
 Sparse PCA via Augmented Lagrangian Methods
Sparse PCA via Augmented Lagrangian Methods
Copyright (c) UC Berkeley, 2011.
http://www.eecs.berkeley.edu/~yang/software/SPCA/SPCA_ALM.zip
 Fast l-1 Minimization Algorithms
and a Performance Benchmark
Fast l-1 Minimization Algorithms
and a Performance Benchmark
Copyright (c) UC Berkeley, 2010.http://www.eecs.berkeley.edu/~yang/software/l1benchmark/index.html
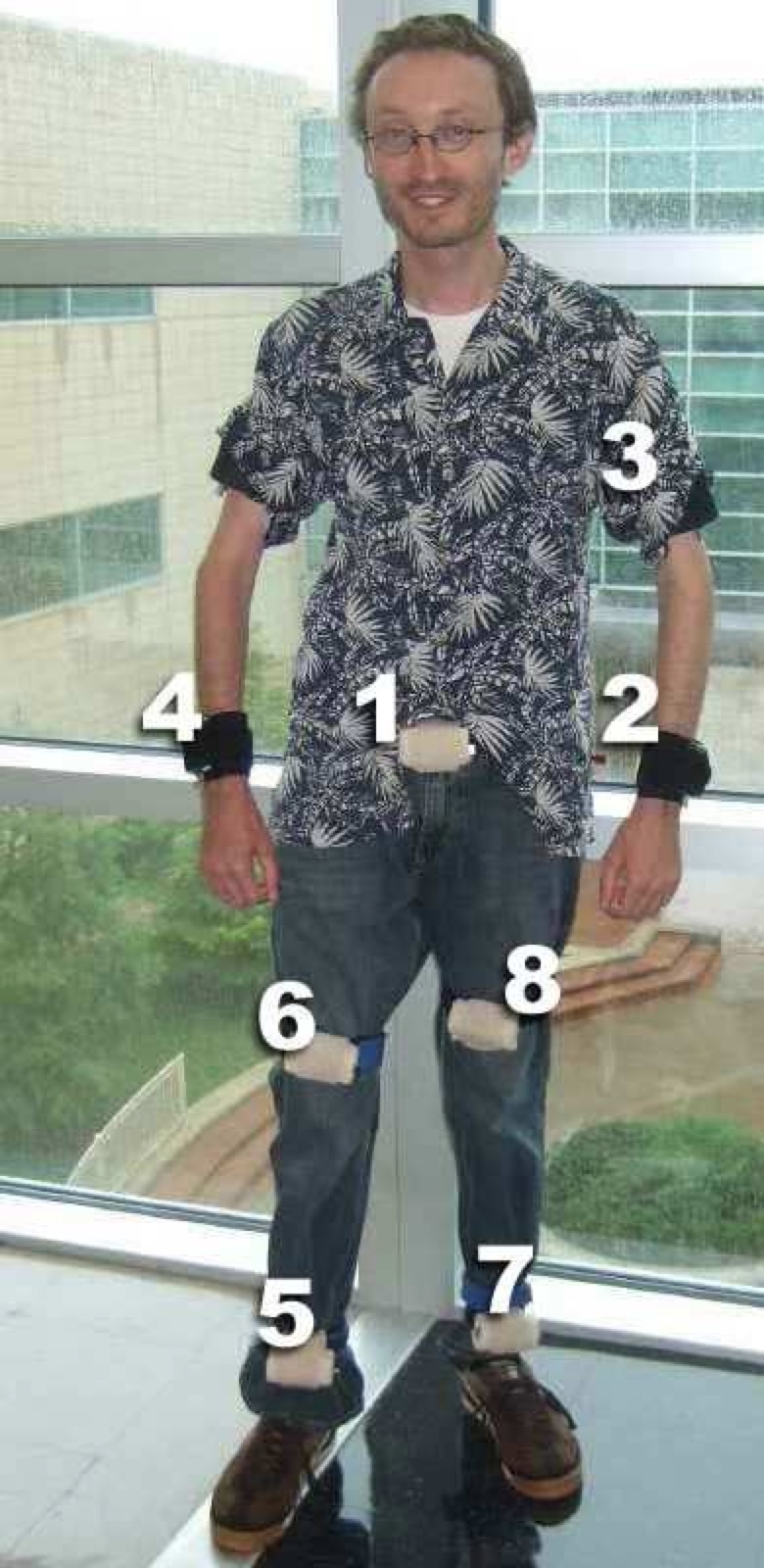
Distributed Wearable Action
Recognition
Copyright (c) UC Berkeley, 2008.For technical details and licensing information, please see our website:
http://www.eecs.berkeley.edu/~yang/software/WAR/index.html

Robust Face Recognition with
Facial Occlusion
Copyright (c) UIUC, 2007.http://perception.csl.illinois.edu/recognition/Home.html

Texture based Image Segmentation
via Lossy Compression
Copyright (c) UC Berkeley, 2007.The CTM toolbox and the image segmentation benchmarking scripts are free for academic users:
http://www.eecs.berkeley.edu/~yang/software/lossy_segmentation/

Generalized Principal Component
Analysis
Copyright (c) UIUC, 2005-2007.
-
EM & K-Subspaces: This package uses iterative EM and K-Subspaces methods to estimate multiple subspace structures with all dimensions given.
- RANSAC on Subspaces: This package consists of two implementations about using ransom sampling techniques to estimate multiple subspaces.
- GPCA for Subspaces of Different Dimensions (GPCA-Voting): This package contains a variation of the original algebraic solution, which uses a voting scheme to improve the segmentation performance in the presence of noise. The number of subspaces and their dimensions are assumed to be given.
- Robust GPCA: This package
consists of implementations of three robust techinques to robustify
GPCA-Voting in the presence of large amounts of outliers. For function
details, please read the README file in the package.
A Fast Line Segment
Detector (MATLAB Toolbox)
The toolbox is free for academic users: [code]